
You might be familiar with fixed-wing drones, which are popular for filming and photographing. But have you thought about the bio-inspired flapping-wing robots? Researchers who study how bats fly are trying to apply the knowledge to the development of next-gen flying robots.
You may ask, what’s the advantage of bio-inspired flapping-wing robots? Compared with fixed-wing robots, flapping-wing robots have decreased mechanical complexity and reduced system mass (Wood et al. 2010, Ma et al. 2013). In other words, the flapping robots are optimized for building smaller and quieter drones in the future.

In nature, many animal species can both fly and glide. Amid them, bats are unique because they are the only mammal that can perform a true and sustained flight. Bats are more skillful than most birds, and they use their flying capability to prey, escape from predators, and migrate (U.S. Department of the Interior). Interestingly, bat wings are highly adapted forelimbs covered with skin membranes. They use the left and right “hands” for flight. Imagine if you could fly using your enlarged hands, where thin-stretchable skin is in between your fingers. That experience would be like Harry Potter’s quidditch performance! In a nutshell, the unique wing structure and flapping motion suggest the possible solution of a novel flying mechanism (Science daily).

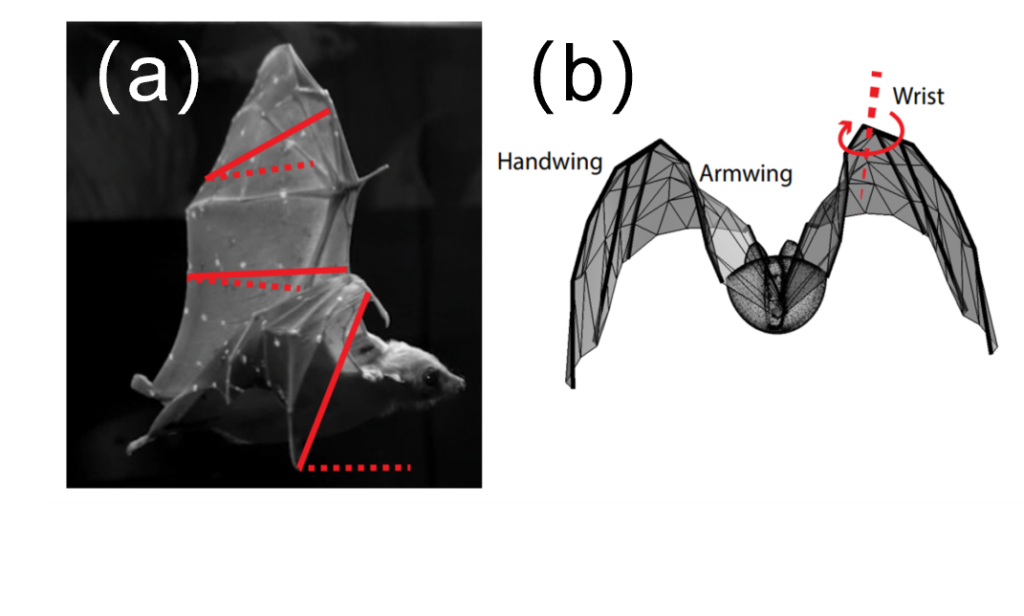
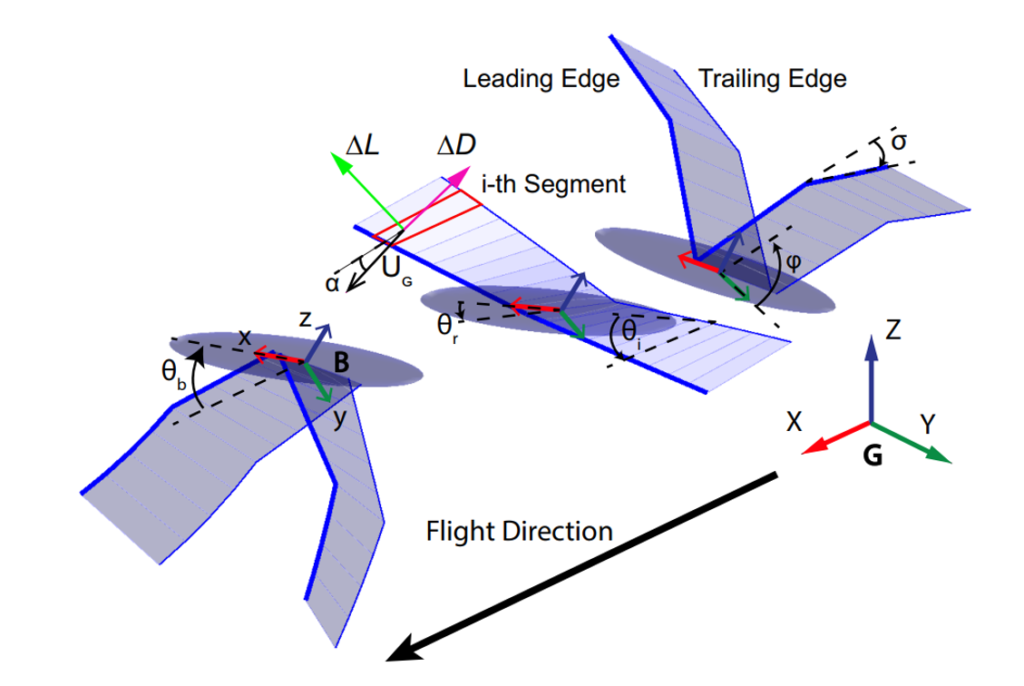
Recently, researchers observed that wing twisting and folding motions play critical roles during the bat fly motion (Fig. 3). Based on this, they built a new dynamic wing-body system with wing twist and fold capabilities (Fig. 4). Next, they ran simulations to test the impact of twist and fold on aerodynamics at different flying velocities. The result shows that wing fold and twist motions reduce the negative lift and thrust during the flight. They also found a folding angle equal to 45° is most energetically beneficial for the flapping-wing robots (Fan et al. 2021).
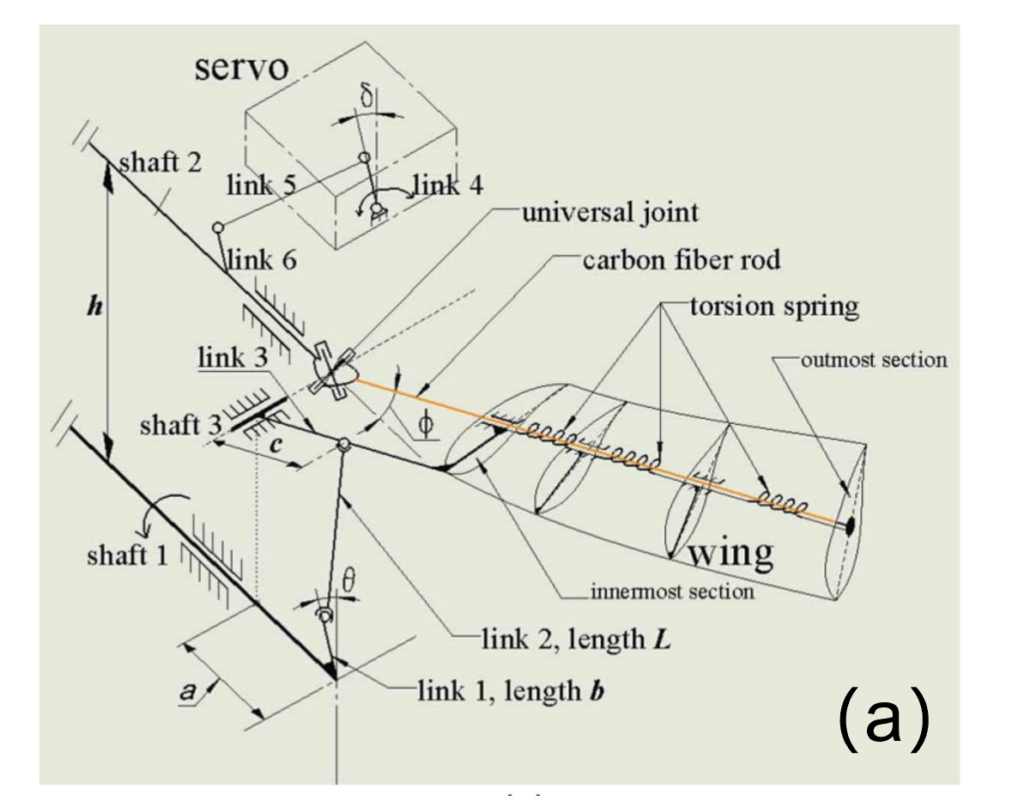
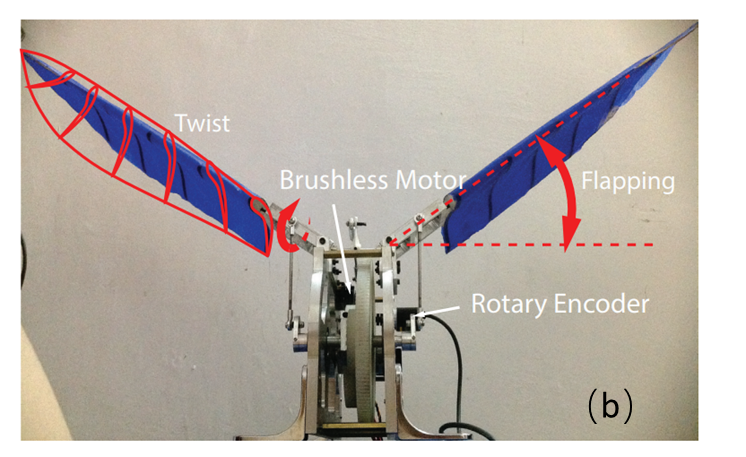
For the future direction, they built a physical model and planned to test the aerodynamics feedback of twisting motion in the wind tunnel. As shown in Fig 5. With this mechanical model, more experimental measurements would be obtained as validation for the current computational model.
Featured image cropped from Flying Bat by Piefke La Belle licensed under CC BY-NC 2.0.