2. [In Preparation] C. Liu, M. Plecnik, “The Effects of Length Scaling on a Singularity-enabled High-powered Mechanical Reflex,” TBA.
3. [Abstract] [Poster] C. Liu, M. Plecnik, “Dynamic Spring-Charging Locomotion Enabled by Mechanical Intelligence”, 2025 Late Breaking Results & Mechanical Intelligence Workshop Poster at 2025 IEEE International Conference on Robotics and Automation (ICRA 2025), Atlanta GA, USA.
4. [Demonstration] C. Liu, M. Plecnik, “Scaling Study for A Mechanism Design that Enables Airborne Energy Storage and Enhances Power Output”, Dynamic Walking 2024, Pensacola FL, USA.
5. [Poster] C. Liu, M. Plecnik, ” Enhancing Locomotion Energetics Via the Design of Actuator Modules That Incorporates Kinematic Singularities,” Poster Presentation at 2024 Midwest Robotics Workshop (MWRW 2024), Chicago IL, USA.
6. [Abstract] [Demonstration] C. Liu, M. Plecnik, ” Enhancing Locomotion Energetics Via the Design of Actuator Modules That Incorporates Kinematic Singularities,” Demonstration at 2023 IEEE/RSJ International Conference on Robotics and Automation (IROS 2023), Detroit MI, USA.
7. [Abstract] [Presentation] [Hardware Demo] C. Liu, K. Barry, M. Plecnik, “Trialing Springy Foot Designs for a Novel Hopping Mechanism”, Dynamic Walking 2022, Madison WI, USA.
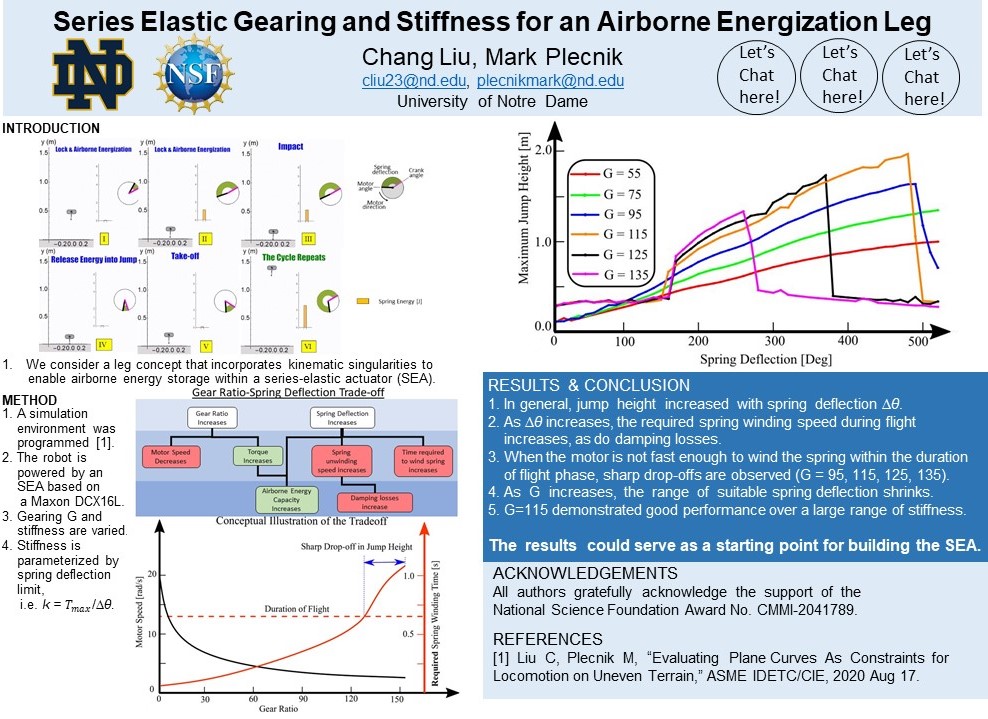
11. C. Liu, M. Plecnik, “Series Elastic Gearing and Stiffness for an Airborne Energization Leg,” Dynamic Walking 2021, Online, Virtual. Poster, Abstract.
{kind=link}
12. C. Liu, M. Plecnik. “Evaluating Plane Curves As Constraints for Locomotion on Uneven Terrain,” International Design Engineering Technical Conferences (IDETC), August 17-19, 2020, Online, Virtual. Winner of the Best Paper Award.
13. C. Liu, Z. Gan, C.D. Remy, “Exploring All Bipedal Gaits with a United Simplistic Model”, Dynamic Walking, May 2018, Pensacola FL, USA. Poster, Abstract.
More articles coming up soon!