As a project for the Design Tools 2 course, the Smart Water-Sensing Sample Collection (SWSSC) project challenged students to design and fabricate an electro-mechanical assembly to be mounted to a quadcopter drone, which could obtain and record water samples. Students were split into groups and given a budget and design requirements, they were then asked to formulate go through one iteration of the engineering design cycle to create a product, which they presented to the client (a professor and graduate students from another department seeking to use these designs start a project). The client was impressed by initial results, and asked for another design iteration, with more refined requirements. The results were then presented to the client, who was extremely satisfied.
The presentation given to the client after the second design iteration can be found here:
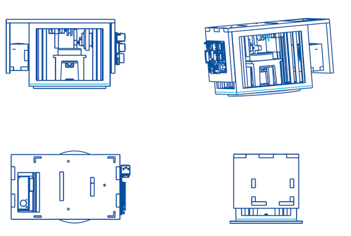
Design Iteration 2 – SWSSC Project – DT2 – Group 9
I was responsible for the design concept which we ultimately chose to use. I then was responsible for designing the assembly, the collection and sampling mechanism, and the joints of the frame parts and doing the CAD for these parts. The frame of the assembly was made from plywood with box joints to improve the accuracy and strength of the final assembly; the frame parts were laser cut and then epoxied or glued (depending on the required strength of the adhesive) together. The sampling mechanisms were made from continuous rotation servos and 3D-printed from PLA. The telescoping arm was created to protect the string lowering the sample cup, to guide the sample cup so that it lined up with the sampling wheel properly, and to allow the assembly to remain as compact as possible in its retracted configuration. The amount of material used for the telescoping was optimized to allow for the mechanism to perform its required tasks while reducing weight as much as possible.
The client was extremely pleased with the final design, and it satisfied all design requirements.