
In the world of engineering, the optimization of prosthetics and robotics is at the forefront of research. However, many designs are faced with the same problem – poor stability, especially when it comes to rough or sloped surfaces. This prevents amputees from being able to enjoy outdoor activities such as hiking and rock climbing, and traversing robots from being able to perform complex search and rescue. So, researchers have gotten creative and have decided to look into nature. Naturally, mountain goats became a prime source of inspiration due to their ability to seemingly defy gravity when scaling mountain tops. How do they do this? To answer this question, plenty of research has been conducted to look into things like goat anatomy, joint angles, centers of mass, ground reaction forces, and more.
There are three main features of goats that contribute to their superior balance: optimal centers of mass (COM), highly flexible joints, and specialized hoof shapes.
With regards to a goat’s COM, for context, a body with a COM far from the ground is more likely to tip when pushed because larger torques are created about its base (think grabbing the end of a wrench). If the COM is closer to the ground, that torque is lessened, making it harder to tip. According to Tian and Zhang’s research published in Biomimetics, a goat’s center of mass is located close to its forelimbs and is low to the ground. As the goat walks up a mountain its forward shifted center of mass causes a forward lean, preventing it from falling backwards without extra exerted energy. Most current prosthetics are developed to walk on flat surfaces, but by creating prosthetics or legs with a forward tilt and low COM, new designs can prevent tipping when walking on slopes and decrease actuation power requirements.
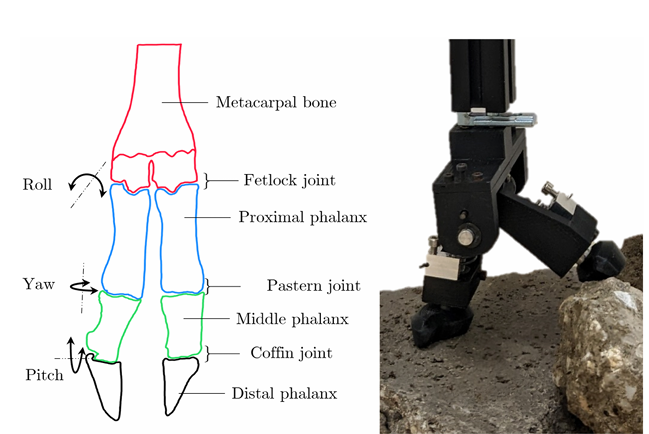
Researchers also found that goat’s joints work together to allow the hoof to adjust pitch, roll, and yaw. If you are unfamiliar with these terms, think of moving your foot up and down (pitch), side to side (roll) and twisting (yaw). As studied by Adab and Herzig during their efforts to create a robotic goat leg, they found that a goat’s joints allow for a large range of motion and work together in a specialized way to allow for more minute hoof adjustments. This makes the goat hoof act similar to an anti-brake system in a car – like how pumping brakes gives your tires more traction, a goat’s slight change in hoof positioning does the same, preventing any sudden shifts in weight. The benefit of a goat hoof doesn’t stop there! Qun Zhang of Beihang University has looked into how the mechanisms of a hoof can apply to robotic design and described how the two separate digits on a hoof make a V-shape that can passively move and grab onto objects on the ground, acting like an anchor. New robotic and prosthetic designs that have similar joint movements and hoof shape can have increased flexibility which can prevent loss of traction on uneven terrains as compared to using a flat-footed design with more fixed joint movement.
Robotic legs, hoof-inspired foot designs, and more have all been created with these features in mind. There is actually an entire mountain-goat leg prosthetic currently in development by Kai Lin at Pratt Institute to help amputees be able to rock climb safely. This is one of many examples on how biomimetic design can lead to innovative solutions that change lives!