
Why should we care about the movement of octopus arms? Octopuses have evolved some of the most sophisticated soft-bodied mechanics in nature, capable of moving in ways that rigid-limbed creatures simply can’t. Their unique flexibility and control over movement offer valuable insights for fields like medical robotics, where delicate and adaptive handling is crucial. This research also helps us understand decentralized control, a model where each part of the body can act somewhat independently, a concept that may transform future technology in fields like disaster recovery robotics and innovative medical devices. By studying how octopuses control their arms, we learn from nature’s solutions to complex challenges.
Continue reading “The Extraordinary Grip of Octopus Arms: How Soft-Bodied Creatures Master Precision and Power”Tag: marine animals
Diving Deep into the Depths: Exploring Biomechanical Adaptations of Deep-Sea Creatures

If you’ve ever been at the bottom of a deep pool or body of water, then you’ve been able to feel some effects of water, also known as hydrostatic, pressure. Your ears begin to pop, your nasal cavity starts to feel a lot of pressure, and your eyes begin to feel compressed. Now imagine diving 10,000 ft deep, where you’d feel 300 times the pressure you would feel during that small dive. Your bones would begin to crush and crack, your lungs would collapse, and much more. We still know very little about the ocean–it is said that we know more about outer space than the ocean–but as we keep exploring, we learn more about different deep sea creatures–aquatic animals residing over 1,000 m below sea level–and how they survive such immense hydrostatic pressure at abysmal depths. By discovering more about their physical adaptations, we can design better vehicles or modes of withstanding these high pressures to venture deeper into the sea. So, how do these creatures survive such immense pressures? What do they have biomechanically that we don’t possess?
Nature’s Second Amendment Right: The Functional Analysis of the Pistol Shrimp Claw

Arthropod evolution is amongst some of the most dynamic processes in biological history, with the exoskeleton constantly developing in entirely unique directions to serve the survivability of the specific host animal. The Pistol Shrimp exhibits one of the most creative evolutionary characteristics: the development of a primary claw with a unique geometry that utilizes the laws of fluid mechanics to develop a shockwave-inducing weapon. Unlike many other arthropods, who have developed exoskeletal properties for defensive purposes, the Pistol Shrimp is a highly aggressive animal that uses its appendage to hunt prey. Analysis of the biomechanical design of this creature will not only provide greater insight into the capacity of natural evolution but will also better inform the design of industrial machinery that functions very similarly to the Pistol Shrimp claw.
Continue reading “Nature’s Second Amendment Right: The Functional Analysis of the Pistol Shrimp Claw”Aliens of the Ocean – How Can an Octopus Manipulate its Body So Well?

Nine brains, eight arms, three hearts, and zero bones – what on Earth could be built like this? The answer… an Octopus!
The octopus is a creature that not only intrigues the avid scuba divers of the world but many in the science community. Often referred to as a “sea alien” – the octopus is a creature that contains extraterrestrial looks and abilities. Regardless of their size, octopuses can morph themselves into incredible shapes and sizes to allow themselves to squeeze through small spaces or expand to demonstrate strength against possible predators. The purpose of this paper is to explore the unique muscular and connective tissue structure of octopuses and how this allows them to do so many out-ofworldly abilities.
Continue reading “Aliens of the Ocean – How Can an Octopus Manipulate its Body So Well?”Air or water? A glance at the conflicts between flight and dive in seabirds

If you were to ask yourself the best way to reach the bottom of an Olympic-sized pool, what would first come to your mind? Most of us would probably say swimming upside down or diving on expiration, i.e. exhaling air from our lungs to sink to the bottom.
In this article, we explore the intriguing nature’s response to this question in the specific case of seabirds, capable of diving as well as flying, which inevitably gives rise to biomechanical conflicts between these two types of locomotion. Understanding energy costs in seabird displacement functions is crucial for a deeper grasp of their natural evolution and behavioral habits.
Continue reading “Air or water? A glance at the conflicts between flight and dive in seabirds”Pacific Rim In Real Life?
How Close are we to a Pacific Rim Reality?

Remember those giant hybrid kaiju-fighting robots from Pacific Rim where the brain of a kaiju (strange beast in Japanese) has successfully infected the mechanical brain of the robots and turned human’s greatest defense against them ? Well, it turns out, the boundary between science fiction and reality isn’t as far as we thought. A researched field “Necrobotics” has taken the world by storm and it is so new that Google is still highlighting “Necrobotics” as red. Imagine a world where nature’s most complex design is integrated into human’s innovation, leading to the most incredible biohybrid systems. If you are drawn the future application of this field or the potential harmony between biology and robotics, you’re in for a treat. In this blog post, we’ll be exploring the existing researches within Necrobotics and the future outlook on this unique field.
Necrobotics, a term derived from “Latinized form of Greek nekros” (relating to death ) and “robotics,” may sound a tad bit eerie, but it’s far from sinister. In fact, it’s all about bringing life to machines. The heart of the research is focused on producing biohybrid system that utilizes the intricate abilities of a living organism while combining with the precision and flawless decision making skills of a robot. Similar to our natural world, it draws inspiration from our environment such as the symbiotic relationship of Bees feeding on a flower’s nectar while carrying its pollen from plant to plant.
So, why should you be interested in this intersection of biology and technology? The applications are nothing short of astounding. One day, we will have biohybrid robots aiding in disaster relief events, enhancing our healthcare capabilities and assisting us in answering humankind most complex questions. These robots are able to mimic natural organism abilities, making them more adaptable, versatile, and resilient than conventional robots. From robotic limbs that respond to neural signals in the body to machines that slither like snakes, Necrobotics are in prime position to push humankind to the next level.

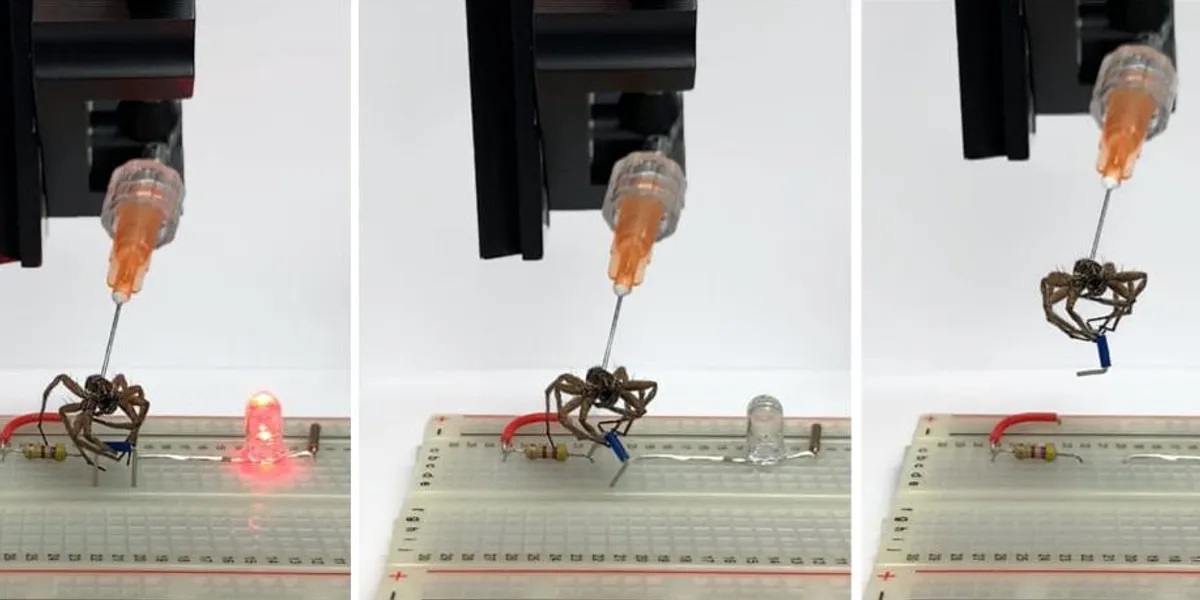
Scientists and engineers have developed a variety of technology by studying organisms that have evolved over millennia of evolution. These technology include surface wettability modification based on lotus leaves and Namib beetles, adhesion mechanisms that mimic gecko toes, and even sensing for smart materials by imitating the color-changing chameleon and the humidity-sensitive pine cone. In order to inform the design of robots and actuators, researchers have also taken inspiration from the locomotion of aquatic and terrestrial animals, such as starfish, jellyfish, and cephalopod. Here is a famous example of dead spider corpse used as a mechanical claw.
In conclusion, these scientific topics may have been initially perceived as science fiction but it has quickly garnered attention and are becoming a crucial step for mankind to take. Future discoveries in this field will have the potential to redefine countless industries while acknowledge nature’s design. So if you’ve ever imagined a time where science and nature coexist, now is the perfect time to get excited about necroboticsᅳthe future is here, and it’s amazing.
Read more: Pacific Rim In Real Life?Growth under Pressure, forces working to constrain size

Allometry and different constraints on the size of land and sea mammals are discussed in this video. A brief explanation of allometry as well as thermoregulation in sea mammals is described in the video.
Nine Brains Are Better Than One: An Octopus’ Nervous System

Picture this: Earth has made its first contact with an extraterrestrial species, and, as to be expected, their anatomy and nervous system are entirely different from our own. Rather than having a single brain where all sensory information and motor controls are processed, they have nine brains. Rather than having a rigid skeleton, they have compact arrays of muscle tissue that stiffen and soften when they move, and their many limbs have an infinite number of degrees of freedom. Oh, and they can only breath underwater, too.
Continue reading “Nine Brains Are Better Than One: An Octopus’ Nervous System”Do Hammer-Shaped Heads Help Sharks Swim?

With their sandpaper skin, cartilage skeleton, electroreceptive sensors, and rows of dangerous teeth, sharks fascinate many people. However, even within this distinctive group the hammerhead sharks that make up the Sphyrnidae family have attracted a special attention due to the unusual shapes of their namesake heads, called cephalofoils. Several evolutionary benefits of the cephalofoil have been proposed by researchers. The wide hammer-shaped head may allow the shark to house more sensory receptors in its snout, to bludgeon prey, and to move and maneuver through the water more easily. Here we will address the question posed by the third theory: Does the cephalofoil found on hammerhead sharks provide an advantage in moving and maneuvering underwater?
Continue reading “Do Hammer-Shaped Heads Help Sharks Swim?”Dolphin Magic or Dolphin Muscle?

Because of the film Bee Movie, many people at one point were intrigued by the idea that bumblebees should not physically be able to fly due to their large bodies and tiny wings. But, they fly anyway. Technology is advanced enough to study bee wing movement and determine that they produce enough lift to allow them to fly, disproving the previous notion. Similarly, Gray’s Paradox for a long time inferred that dolphins should not be able to swim nearly as fast as they do. But, they still consistently swim at speeds over twenty miles per hour. It was not until recent history that advancements allowed researchers to determine why they are able to reach such high speeds.
Continue reading “Dolphin Magic or Dolphin Muscle?”